
Início » Posts tagged 'parênteses de Poisson'
Tag Archives: parênteses de Poisson
Mecânica Quântica – Revisões VI
— 19. Resolução de Exercícios —
Exercício 2 Escolha o conjunto de coordenadas generalizadas que especifica totalmente o estado mecânico de cada um dos sistemas:
|
 que se move ao longo de uma elipse.
que se move ao longo de uma elipse.
 e
e  . Então a coordenada generalizada é
. Então a coordenada generalizada é  . Para o caso do leitor ter ficado surpreso com o facto de só precisarmos de uma coordenada para descrevermos um sistema que aparentemente é bidimensional lembre-se que a nossa partícula está restringida a mover-se ao longo de uma linha que ainda que seja curva não deixa de ser unidimensional. Outra maneira de ver é pensando que temos
. Para o caso do leitor ter ficado surpreso com o facto de só precisarmos de uma coordenada para descrevermos um sistema que aparentemente é bidimensional lembre-se que a nossa partícula está restringida a mover-se ao longo de uma linha que ainda que seja curva não deixa de ser unidimensional. Outra maneira de ver é pensando que temos  coordenadas originais e
coordenadas originais e  equação de ligação. Assim pelo que vimos em
equação de ligação. Assim pelo que vimos em  graus de liberdade, logo só precisamos de uma coordenada generalizada para descrever os estado mecânico do sistema.
graus de liberdade, logo só precisamos de uma coordenada generalizada para descrever os estado mecânico do sistema.  a distância percorrida e
a distância percorrida e 
 e
e  .
.
| Exercício 3 Derive as transformações de equações para um pêndulo duplo.
Temos: |




| Exercício 4 Mostre que é:
Temos
Que é o resultado pretendido |

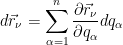
Exercício 5 Considere um conjunto de partículas que descrevem um incremento  nas suas coordenadas generalizadas. Derive a seguinte expressão nas suas coordenadas generalizadas. Derive a seguinte expressão  para o trabalho total realizado pela força que actua no sistema e interprete fisicamente o factor para o trabalho total realizado pela força que actua no sistema e interprete fisicamente o factor  . .
Primeiro vamos notar que é
Para
e |
 é
é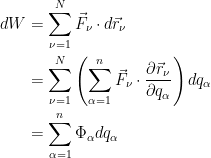
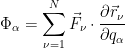 é a força generalizada.
é a força generalizada.
Exercício 6 Mostre que  . .
Temos e Logo
Uma vez que |
 são linearmente independentes (ou se preferir, são arbitrários) vem que
são linearmente independentes (ou se preferir, são arbitrários) vem que
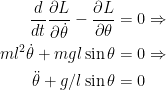
| Exercício 7 Derive o lagrangiano de um pêndulo simples e obtenha as equações de movimento
A coordenada generalizada para o pêndulo simples é
A energia cinética é
A energia potencial é Assim o lagrangiano é Uma vez que temos e E a equação de Euler-Lagrange fica
|

 and
and  .
. .
. .
.

| Exercício 8
Duas partículas de massa
A energia cinética é
A energia potencial é
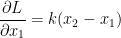
Logo o lagrangiano é As derivadas parciais do lagrangiano são: E as equações de Euler-Lagrange ficam: |
 estão ligadas entre si e a duas paredes por molas de constante
estão ligadas entre si e a duas paredes por molas de constante  . As partículas deslocam-se ao longo de uma direcção. Use as equações de Euler-Lagrange para descrever o movimento das massas.
. As partículas deslocam-se ao longo de uma direcção. Use as equações de Euler-Lagrange para descrever o movimento das massas.
 .
. .
. .
.





| Exercício 9
Uma partícula de massa
|
 . A energia potencial é
. A energia potencial é  . Logo o lagrangiano é
. Logo o lagrangiano é



Exercício 10 Para um duplo pêndulo calcule:
|
 às equações anteriores
às equações anteriores



![\displaystyle K=1/2m_1l^2_1\theta^2_1+1/2m\left[ l^2_1\dot{\theta}^2_1+l^2_2\dot{\theta}^2_2+2l_1l_2\dot{\theta}_1\dot{\theta}_2\cos(\theta_1-\theta_2) \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++K%3D1%2F2m_1l%5E2_1%5Ctheta%5E2_1%2B1%2F2m%5Cleft%5B+l%5E2_1%5Cdot%7B%5Ctheta%7D%5E2_1%2Bl%5E2_2%5Cdot%7B%5Ctheta%7D%5E2_2%2B2l_1l_2%5Cdot%7B%5Ctheta%7D_1%5Cdot%7B%5Ctheta%7D_2%5Ccos%28%5Ctheta_1-%5Ctheta_2%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle V=m_1g(l_1+l_2-l_1\cos\theta_1)+m_2g\left[l_1+l_2-(l_1\cos\theta_1+l_2\cos\theta_2)\right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+V%3Dm_1g%28l_1%2Bl_2-l_1%5Ccos%5Ctheta_1%29%2Bm_2g%5Cleft%5Bl_1%2Bl_2-%28l_1%5Ccos%5Ctheta_1%2Bl_2%5Ccos%5Ctheta_2%29%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)







 e
e  e escreva as equações de movimento.
e escreva as equações de movimento.
 sabemos que
sabemos que  e
e  .
.

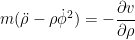
Exercício 11 Uma partícula move-se no plano  sujeita a uma força central que é uma função da distância entre a partícula e a origem. sujeita a uma força central que é uma função da distância entre a partícula e a origem.
|
 e
e  .
. .
.




| Exercício 12
Uma partícula descreve um movimento unidimensional sujeita a uma força da forma
Onde
Uma vez que
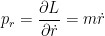
Para a energia cinética é
Ora E o hamiltoniano é
Uma vez que
Uma vez que |
 são constantes positivas. Calcule o lagrangiano e hamiltoniano. Compare o hamiltoniano com a energia total e discuta se existe conservação de energia para este sistema.
são constantes positivas. Calcule o lagrangiano e hamiltoniano. Compare o hamiltoniano com a energia total e discuta se existe conservação de energia para este sistema. vem que
vem que  .
. . Assim o lagrangiano é
. Assim o lagrangiano é
 .
.
 o sistema não é conservativo.
o sistema não é conservativo. sabemos que é
sabemos que é  .
.
| Exercício 13
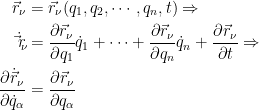
Considere duas funções das coordenadas generalizadas e os momentos generalizados, Mostre que as seguintes propriedades do parênteses de Poisson são válidas:
Se o parênteses de Poisson entre duas funções é nulo então dizemos que as duas funções comutam. |
 e
e  . O parênteses de Poisson é definido como:
. O parênteses de Poisson é definido como:![\displaystyle [g,h]=\sum_k \left(\frac{\partial g}{\partial q_k}\frac{\partial h}{\partial p_k}-\frac{\partial g}{\partial p_k}\frac{\partial h}{\partial q_k}\right)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%5Bg%2Ch%5D%3D%5Csum_k+%5Cleft%28%5Cfrac%7B%5Cpartial+g%7D%7B%5Cpartial+q_k%7D%5Cfrac%7B%5Cpartial+h%7D%7B%5Cpartial+p_k%7D-%5Cfrac%7B%5Cpartial+g%7D%7B%5Cpartial+p_k%7D%5Cfrac%7B%5Cpartial+h%7D%7B%5Cpartial+q_k%7D%5Cright%29+&bg=ffffff&fg=000000&s=0&c=20201002)
![{ {\dfrac{dg}{dt}=[g,H]+\dfrac{\partial g}{\partial t}}}](https://s0.wp.com/latex.php?latex=%7B+%7B%5Cdfrac%7Bdg%7D%7Bdt%7D%3D%5Bg%2CH%5D%2B%5Cdfrac%7B%5Cpartial+g%7D%7B%5Cpartial+t%7D%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.
![{ {\dot{q}_j=[q_j,H]}}](https://s0.wp.com/latex.php?latex=%7B+%7B%5Cdot%7Bq%7D_j%3D%5Bq_j%2CH%5D%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) e
e ![{ {\dot{p}_j=[p_j,H]}}](https://s0.wp.com/latex.php?latex=%7B+%7B%5Cdot%7Bp%7D_j%3D%5Bp_j%2CH%5D%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.
![{ {[p_k,p_j]=0}}](https://s0.wp.com/latex.php?latex=%7B+%7B%5Bp_k%2Cp_j%5D%3D0%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) e
e ![{ {[q_k,q_j]=0}}](https://s0.wp.com/latex.php?latex=%7B+%7B%5Bq_k%2Cq_j%5D%3D0%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.
![{ {[q_k,p_j]=\delta_{ij}}}](https://s0.wp.com/latex.php?latex=%7B+%7B%5Bq_k%2Cp_j%5D%3D%5Cdelta_%7Bij%7D%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.
 não depende explicitamente de
não depende explicitamente de  então
então ![{ {[f,H]=0}}](https://s0.wp.com/latex.php?latex=%7B+%7B%5Bf%2CH%5D%3D0%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.  diz-se uma constante de movimento.
diz-se uma constante de movimento.
